")
I don’t have classes on Friday this semester. I spent most of the day doing research (learning how to do exploratory factor analysis on some survey data).
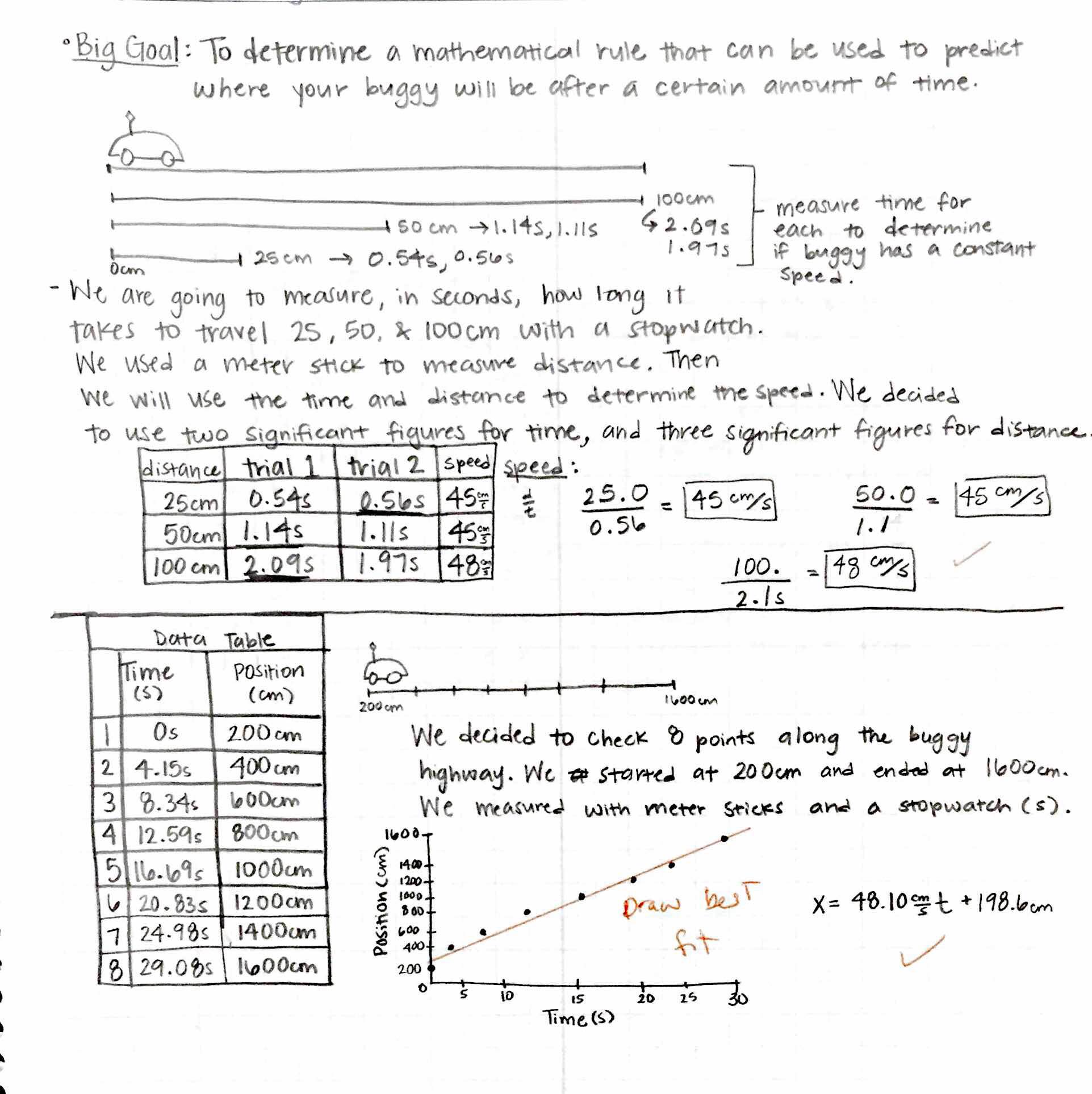
Teaching-wise, I started grading lab books. Here is a photo of one students’ lab book fro the buggy lab to offer a feel for the kind of work they are expected to turn in. Keep in mind, these are lab books (not lab reports).
There are also 4-6 summarizing at the end. This lab had following questions:
- How can you decide by looking at your position vs. time graph whether or not the buggy moved at (roughly) a constant speed or not?
- What value for the buggy’s speed did you get using your “quick and easy” method? How did this compare to the slope of the mathematical rule you determined?
- Write down the mathematical rule you determined for the buggy’s motion.
- What would be different if the buggy had moved faster?
- What would be different if the buggy had started at a different location?
- What would be different if the buggy had moved in the opposite direction?
- What did you learn today that might help you address the challenge lab?
Most groups were able to make good connections between slope and speed, intercept and initial position, and the sign of the slope with direction. Based on the lab books, one group, however, did struggle to make those connections.
Today, I have spent some of the day prepping for our next meeting. Students will have read over the weekend two sections from the text that will build on the buggy lab: a section on position vs time graphs and a section on uniform motion. We will also return to class next week with some clicker questions to review these ideas.
Then students will revisit motion detectors to make graphs. [Last time we just used them to make motion diagrams.] This lab exploration starts off just qualitative, with students making predictions and observations as well as doing some graph matching; but it transitions to quantitative stuff with students re-applying what they learned about linear fits (in Logger Pro) last week to extract velocity information. The last task of the lab exploration has them re-measure the speed of their buggy using this new technique.
Then we will have our first day of collaborative problem-solving.
The plan for problem-solving is
- Staged Problem-solving: We are following Knight’s break-down for problem-solving into “Prepare, Solve, Assess”. So students will be given a problem, and groups will first be asked just to prepare on whiteboard. Preparing at this point involves making pictures, collecting important information, and doing preliminary calculations. A little bit of discussion to highlight different aspects of students’ work. Before beginning the problem, we will ask students to make guesstimate for, “Best Guess, Definitely too Long”. Then they will solve the problem. Discussion similar as needed. Then they will be asked to assess in variety of ways, including checking against their guesstimate, making sure they have actually answered the question, checking units.
- Un-staged Problem-solving: Students have to do each of the steps, prepare, solve, assess, but we won’t pause to discus between each.
Both problems are two-body uniform motion that don’t involve simultaneous system of equation. For example, one has two cars traveling the same trip, one traveling faster but leaving leaving at an early time. Question is who will finish first and how long will they have to wait for the other to arrive? Students will be required as part of “solve” to make a position vs time graph. Groups who finish solving early will be asked to solve for other aspects, including when and where did they pass each other.
If we have time, I want students to use their skills to solve a real buggy collision problem. Since in the lab exploration, they already got the speed of their buggy again, this may be doable time-wise. I’d like to do this so they can use their skill to actually predict something, but it also rehearses something like our “Challenge Lab”.

I’m curious about the BFL for the lab book you showed. I would be tempted to ensure the line goes through the y-intercept at 200 cm because (I assume) we know with very high certainty that at t=0s x=200 cm. But does the line represent our uncertainty and variability in measurements or the uncertainty and variability in the model? If the answer is the latter, then I see why the line doesn’t have to go through x=200cm. And obviously if the data was analyzed using linear regression, the line wouldn’t go through x=200cm
thanks
Doug
It’s logger pro. With students we talked about why their intercepts were always less than the actual starting place. We realized this means that they are probably always hitting the stopwatch AFTER the buggy reaches the location. Does that make sense?
That’s interesting, I hadn’t thought of that. Thanks.