
In class this semester, we used bar magnets oscillating on springs through solenoids to induce alternating currents. In getting ready for lab, I noticed that, in certain configurations, the current induced was sinusoidal (as desired), but in other configurations they induced current was periodic but not very sinusoidal. This got me wanting to model the phenomena a little more closely.
By Faraday’s law, the induced potential (and current) is related to change in magnetic flux through the coil. A big reason for the non-sinusoidal regime it turns out is due to how a magnetic dipole field (on axis ) goes like B ~ 1/z^3, where z is the distance from the center of the dipole. Anyway, since the area isn’t changing, the change in magnetic flux will be driven by the change in magnetic field in the coil as the magnet moves, which goes like 1/z^3.
Using the Chain Rule, we can write, dB/dt = dB/dz* dz/dt. This shows that the change in flux is driven by two factors, the gradient of the B-field and the velocity of the bar magnet.
Assuming the motion of the bar magnet is roughly damped harmonic oscillation, we can write z(t) = A exp(-rt) cos(wt) + C. A is the amplitude of the oscillation, C is the offset equilibrium position of the magnet above the coil.
Making additional assumptions that the damping is small, the velocity will be roughly, dz/dt = wA exp(-rt)sin(wt) [The other term in the product rule will be small]
Anyway, plugging in our expression for z into our expression for the dB/dt, we get V ~ exp(-rt) sin(wt) / (A(cos(wt) +C)^4
To make sense of this, we have to think about large amplitudes vs. small amplitudes (relative to the offset C).
When A is really small relative to offset C, the denominator is roughly constant, so the change in magnetic field is dominated by the numerator and should be roughly sinusoidal. This means that the change in magnetic flux should be in sync with the velocity. High velocity means rapidly changing flux. When the amplitude is significant compared to the the offset, the denominator comes close to zero, and so has a big impact. That is, the magnetic flux is strongly affected by gradient of the magnetic field.
Here is a graph of the induced current vs time (black) and speed vs time (green), based on the models above.
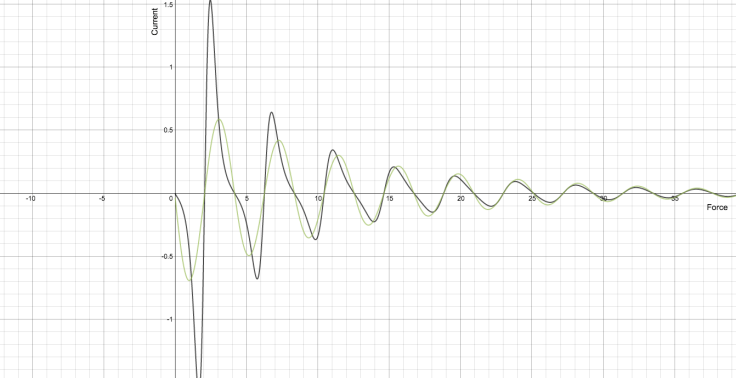
You can see that the model shows that as the amplitude decays, the induce current and speed of the bar magnet get in sync (and both are sinusoidal). When the amplitude is large, the peak current does not correspond with peak velocity.
Actual data for the induced current looks something like this:
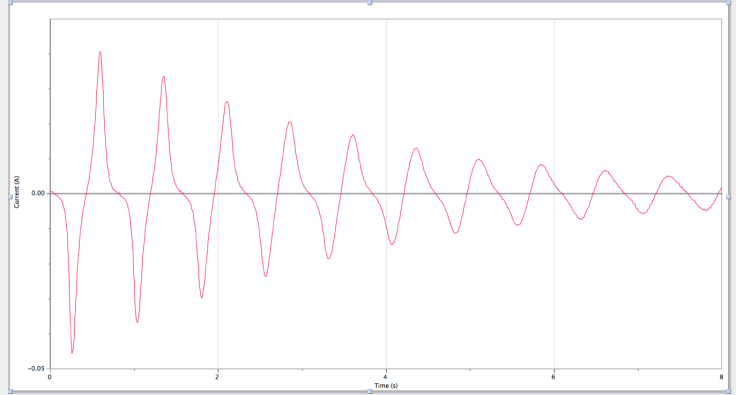
There are a lot of assumptions and simplifications of this model, but it gets a lot of the behavior right. Lots more to dig into, but don’t have the time to get distracted right now!

This is great! I’ve always thought that doing things like this with bar magnets was going to make things nasty due to the 1/z^3 stuff, but this is pretty clean. I especially love your discussion of the large and small amplitude limits.
Is this worth it to teach, and at what level? Certainly advanced students could have a lot of fun with this. But I wonder if this could be scaffolded (which google says is not a word) well for less experienced students. I know one thing, if anyone could do it, it’s you!
Thanks, Andy. I think it may be possible to do this with intro students (calc-based), but we have an intermediate level E&M / Waves course for students not in our “graduate school” track. It’s for physics teachers and applied physics concentrations, who may not need Griffith’s level E&M but need more rigor / background than intro provides. I was thinking that this could be at the right level for this group. The cleanness of the theory and the data is what makes me want to try and see how it goes.
Very cool